
无人驾驶技术与系统

课程负责人:
艾长胜
课程班级:
共建教师:
孙选
张成梁
课程建设:省级教学案例库
开课学院:机械工程学院
开课时间:2022年03月13日
学习人数:13人
有效时间: 永久有效
评分:
课程简介
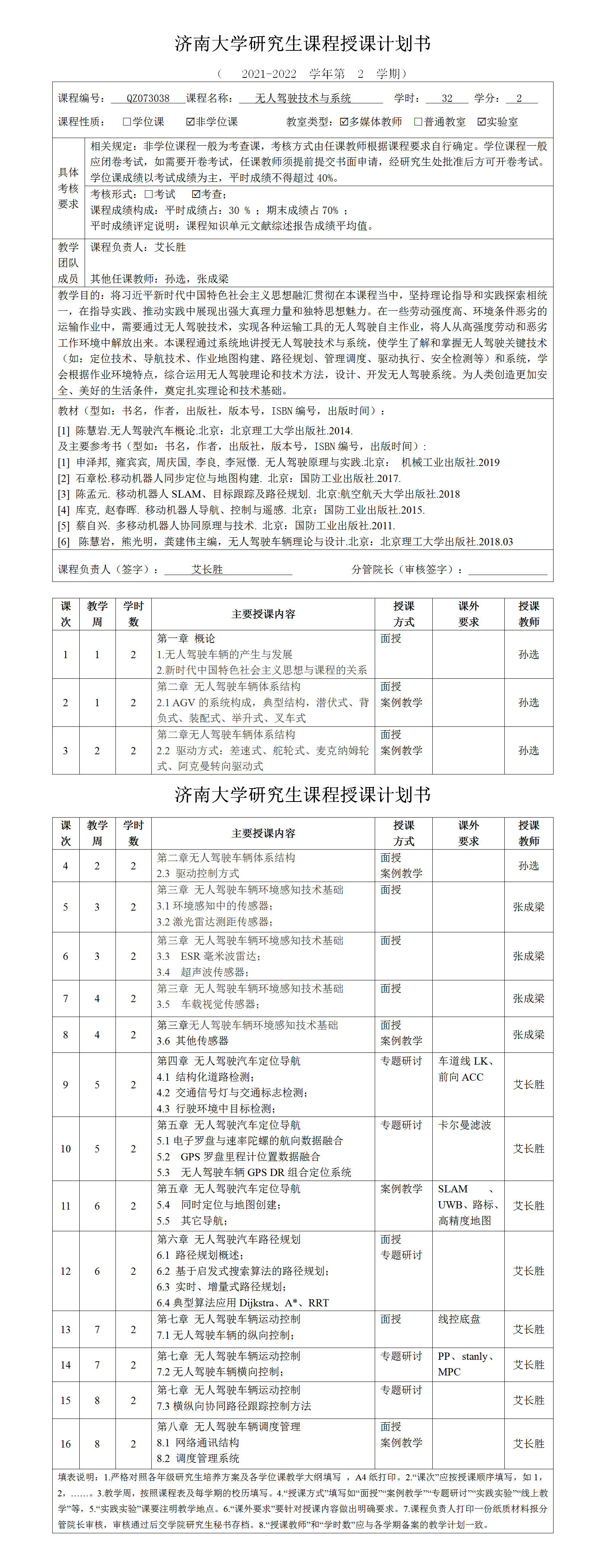
在一些劳动强度高、环境条件恶劣的运输作业中,需要通过无人驾驶技术,实现各种运输工具的无人驾驶自主作业,将人从高强度劳动和恶劣工作环境中解放出来。本课程通过系统地讲授无人驾驶技术与系统,使学生了解和掌握无人驾驶关键技术(如:定位技术、导航技术、作业地图构建、路径规划、管理调度、驱动执行、安全检测等)和系统,学会根据作业环境特点,综合运用无人驾驶理论和技术方法,设计、开发无人驾驶系统。
展开

教学大纲
1、无人驾驶车辆的产生与发展;
2、无人驾驶车辆体系结构;
3、无人驾驶车辆环境感知技术基础,包括: 3.1环境感知中的传感器;3.2 激光雷达测距传感器;3.3 ESR毫米波雷达;3.4 车载视觉传感器;
4、无人驾驶车辆环境感知,包括:4.1结构化道路检测;4.2 非结构化道路检测;4.3 行驶环境中目标检测;
5、无人驾驶汽车定位导航,包括:5.1电子罗盘与速率陀螺的航向数据融合;5.2 GPS罗盘里程计位置数据融合;5.3 无人驾驶车辆GPS DR组合定位系统实例;5.4 其它导航;5.5 同时定位与地图创建;
6、无人驾驶汽车路径规划,包括:6.1路径规划概述;6.2 基于启发式搜索算法的路径规划;6.3 实时、增量式路径规划;
7、无人驾驶车辆运动控制,包括:7.1无人驾驶车辆的纵向控制;7.2 基于航向预估的无人驾驶车辆横向控制;7.3 基于滑模变结构理论的无人驾驶车辆横向控制;7.4 考虑环境信息与车辆约束的无人驾驶车辆路径跟踪;
8、无人驾驶车辆一体化设计,包括:8.1传统无人驾驶车辆;8.2 无人驾驶车辆一体化设计。
展开
授课计划
展开
教学团队

团队介绍未设置